SLAM Notes
LUCI as a sensor platform allows for a jump start on applying a SLAM methodology to power wheelchairs.
While LUCI does not offer a existing SLAM package for the ROS2 SDK here are a few tips for a successful implementation.
Packages
There are two main SLAM packages that have been successful with partners.
Both have their pros and cons but can run successfully with only LUCI data streams.
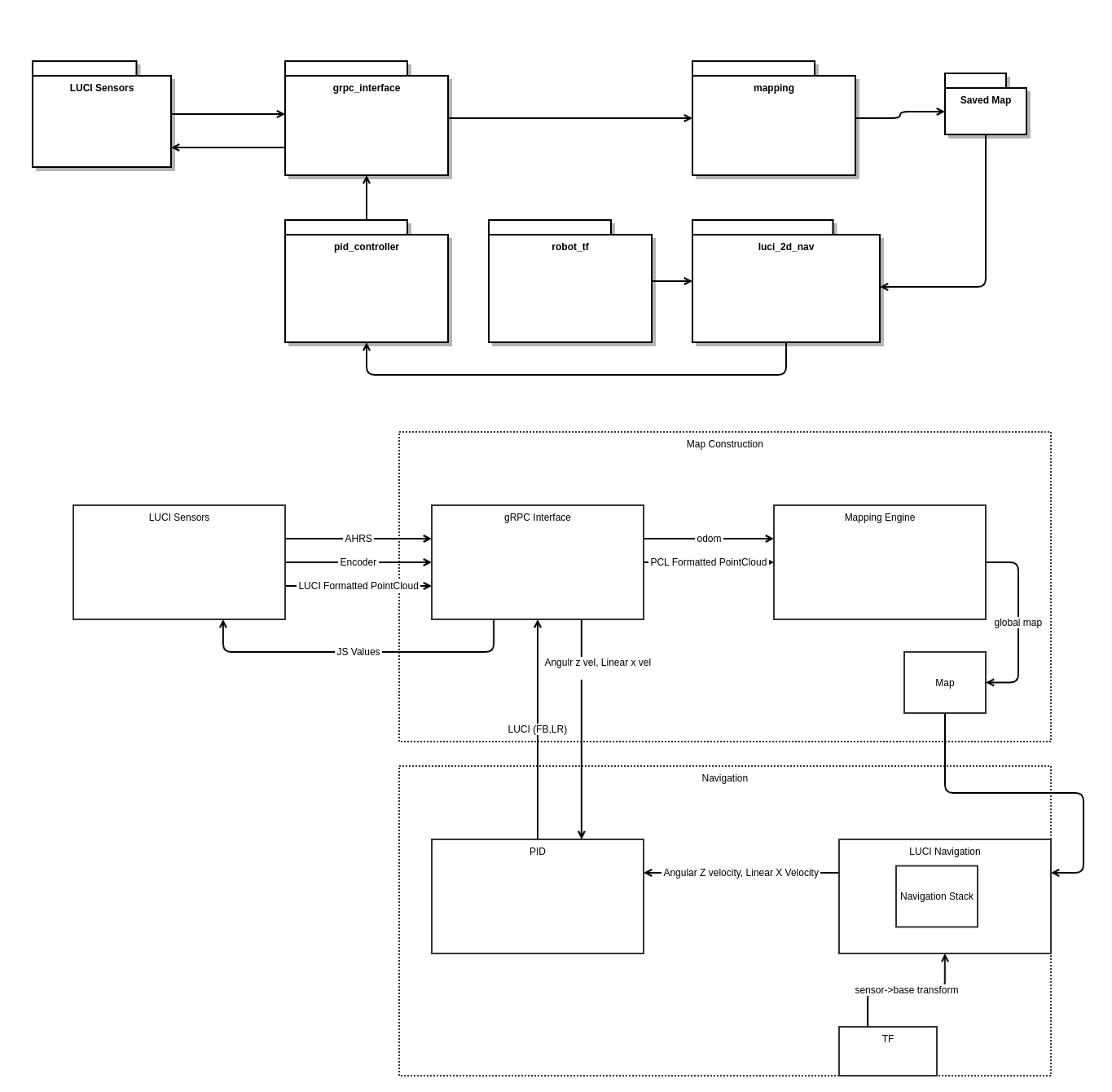
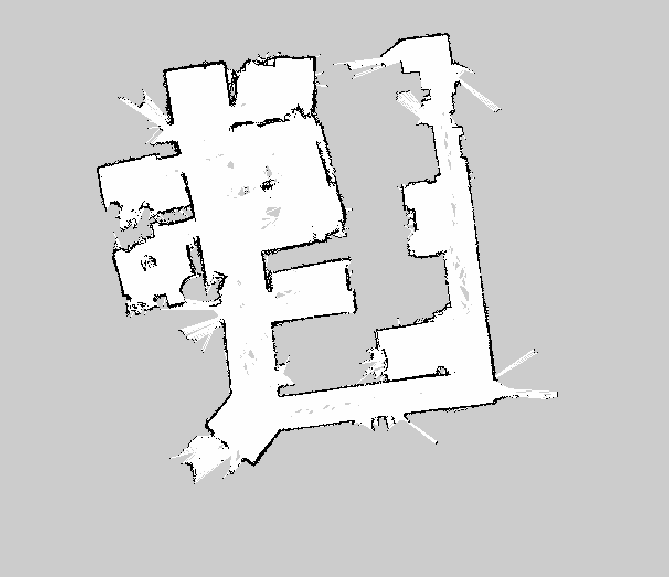
Architecture
Here is a sample design of an implementation and what the resulting map looked like
Data
2D vs 3D
While some of the SLAM nodes will expect a 2D point cloud and LUCI provides a 3D cloud you will need some method of converting our provided feed to 2D. This can be done in a couple of ways.
- Implement a z height flatten filter that casts all points to a single z height.
- Run through an existing pointcloud->lidar converter node. This one proved decent.
pointcloud_to_laserscan
Casting points to 2D produces a decent map but will struggle with localization later.
Ultrasonic Data
As LUCI produces ultrasonic curves as points it is recommended that you do NOT include them in the mapping of an environment as they will add curved noise to your map.
JS to Twist Message
As LUCI and wheelchairs operate with a left-right/forward-back joystick and most ROS2 packages expect a Twist message a conversion node will be required.
Here are two different methods LUCI has played with to varying degrees of success that may be of help.
- Find the max speed at a given speed setting then apply a linear fit mapping JS for 0-Max speed in a piece-wise function that is stepped based on speed settings.
- Create a PID loop that takes in a chairs speed (already exposed through the luci_grpc_interface) as well as a goal speed and output a JS value of 0-100.
Either can be run as a “converter” node in between the SLAM node and the grpc-endpoint node. We recommend the PID approach.